
Thumbs-Up by Luckshan Raj
Event Location: Cocoa-FL
Competition: Energy Transfer Machine
Division: 6-8
School: South Creek Middle
Team Name: Wild Cats
Project Name: Thumbs-Up
Team Size: 1
Wild cats of South Creek Middle school
Hello All, I would like to demonstrate my Rube Goldberg Machine to raise the Thumbs-Up flag.
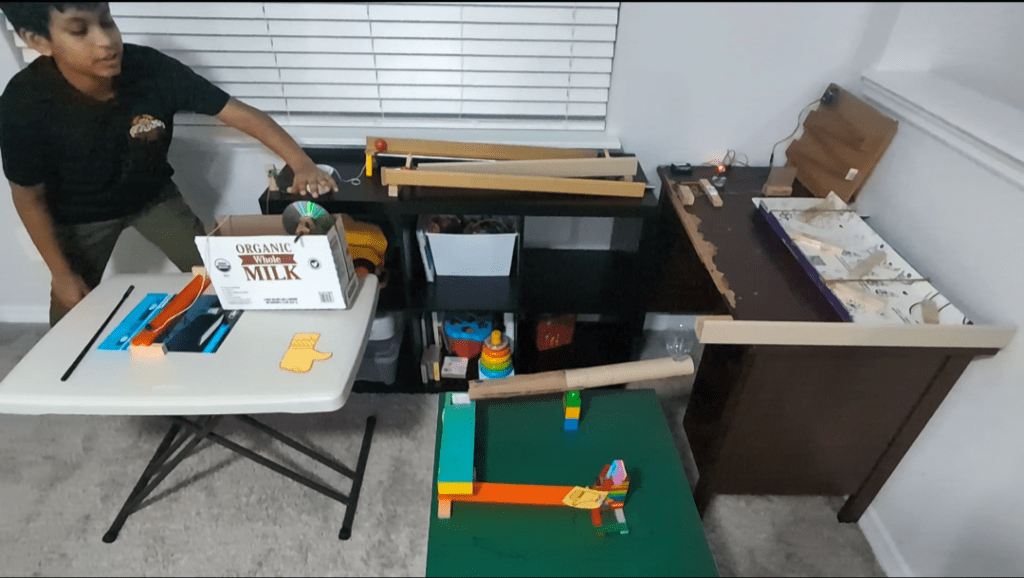
Lets see how my Rube Goldberg machine turns the Thumbs – down into a THUMBS – UP and the various types of Energy transfers involved in the steps in detail.
Step 1:
In this step I have made a CD inserted in a pencil to roll down a ramp as a wheel and axle. The CD stays in potential energy which rolls down when disturbed down the ramp due to gravitational force and rotational inertia. The CD disturbs the thread that is stopping the marble in step 2.
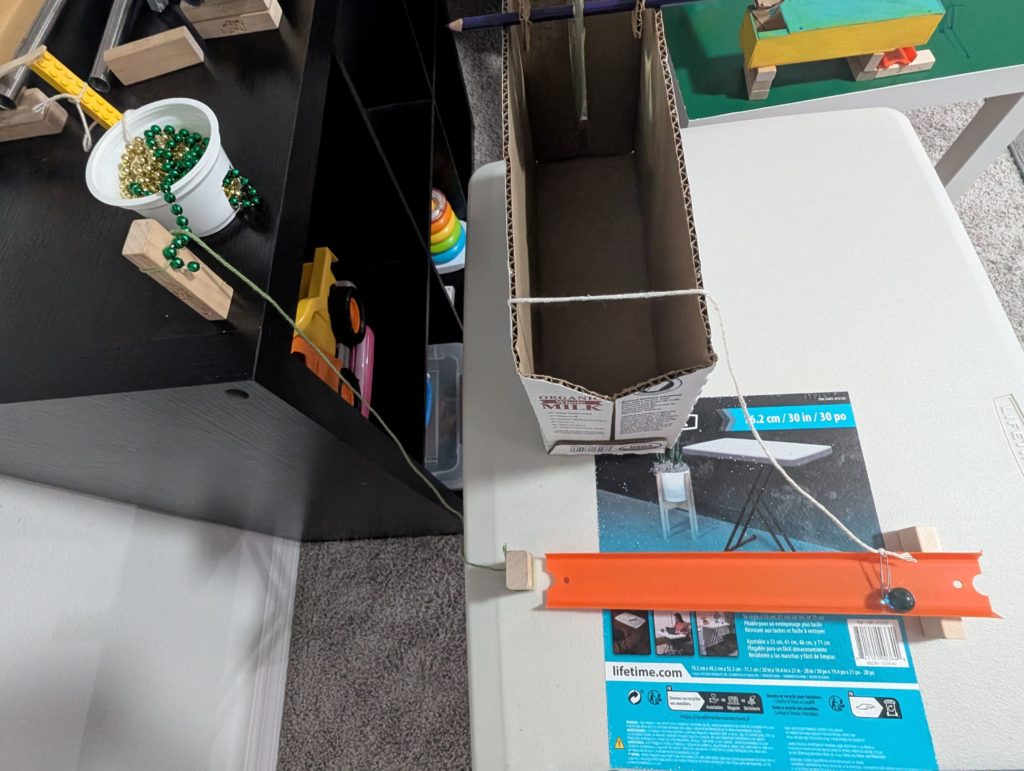
Step 2:
In this step the marble knocks down the Jenga block which is tied to a long bead chain.
Step 3:
The other end of the bead chain is connected to a wedge that is preventing a ball from rolling into a ramp which will in turn activates a series of chain reaction.

Step 4:
The last ball pushes a Jenga block which is connected to a card that acts as a screen to block the ultrasonic sensor.
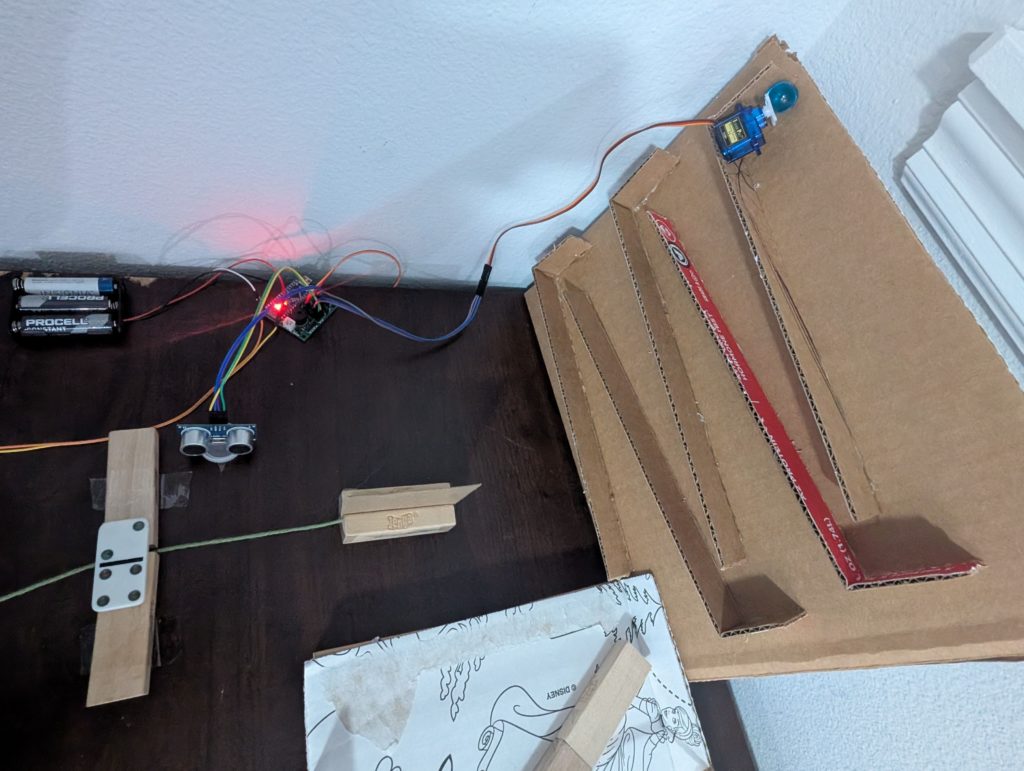
Step 5:
This is the electrical part of my project. Here I have used an Arduino Nano which is powered by a 4.5 V battery. The Arduino Nano has been connected to an ultrasonic sensor and a servo motor, the ultrasonic sensor has two parts, the trigger section and the echo section, the echo section sends out an infrared laser as a signal, when the laser hits something it will reflect to the trigger section and the time it took for the laser to reach the trigger section will be used to detect how far an object is. The servo motor is a type of motor that can only turn 180° unlike the normal dc motor that works 360°, so when the ultrasonic sensor detects something in 5 centimeters, then it will send a signal to the servo motor to turn and release the marble into the track.
Code of the Aurdino Nano:
int trig = 2;
int echo = 3;
#include <Servo.h>
#include <Ultrasonic.h>
Ultrasonic sensor (2,3);
float dis;
float scale_factor = 1.1;
Servo MyServo;
void setup() {
MyServo.attach(4);
pinMode(trig,OUTPUT);
pinMode(echo,INPUT);
}
void loop() {
dis = sensor.read();
dis = dis*scale_factor;
MyServo.write(0);
if (dis <= 5) {
MyServo.write(90);
delay(6000);
}
else {
MyServo.write(0);
}
}
Step 6:
The Marble which is set to kinetic energy by the servo motor then travels through a series of a maze and enters a funnel and reaches the Periscope which I made in the Home depot workshop.

Step 7:
The final step, the periscope changes the direction of the marble allowing it to enter the track that leads to the lever that is holding the Thumbs -up flag down(shown in the fig on the left). As the marble hits that lever it pushes the flag pole in the opposite direction resulting in the thumbs- down to THUMBS – UP…
Here is the video explanation of the steps of my project.
Lets see the final run of my Thumbs-Up project now…
Hope you all liked my project. Thank you for watching and please don’t forget to give a THUMBS – UP 👍to my project in the comments.
Very well crafted. Excellent job!
Well designed and constructed machine. You can tell you put a lot of thought into the steps. The use of the arduino and servo add an extra layer of technical complexity to the project. It was good you could add those skills into this mostly mechanical competition. You were very clear when explaining the steps, it was clear you know your project inside and out. I look forward to your future ETM entries.